



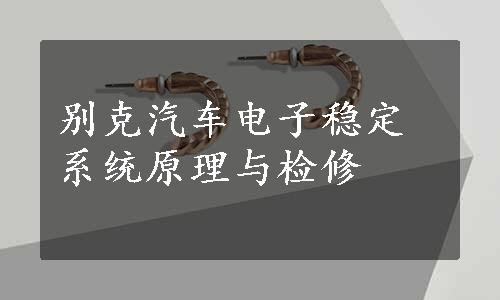
别克荣御轿车ESP是在原有防抱死制动系统(ABS)、电子制动力分配(EBD)和牵引力控制(TCS)系统的基础上发展起来的,其制动系统具有上述所有功能。汽车电子稳定系统主要由传感器(轮速传感器、减速度传感器、横摆率传感器、转向角度传感器、制动液压传感器、节气门位置传感器)、电子控制单元、执行器及警示装置组成。图731所示是别克荣御轿车的汽车电子稳定系统零件位置及其组成图。其电路如图732所示。
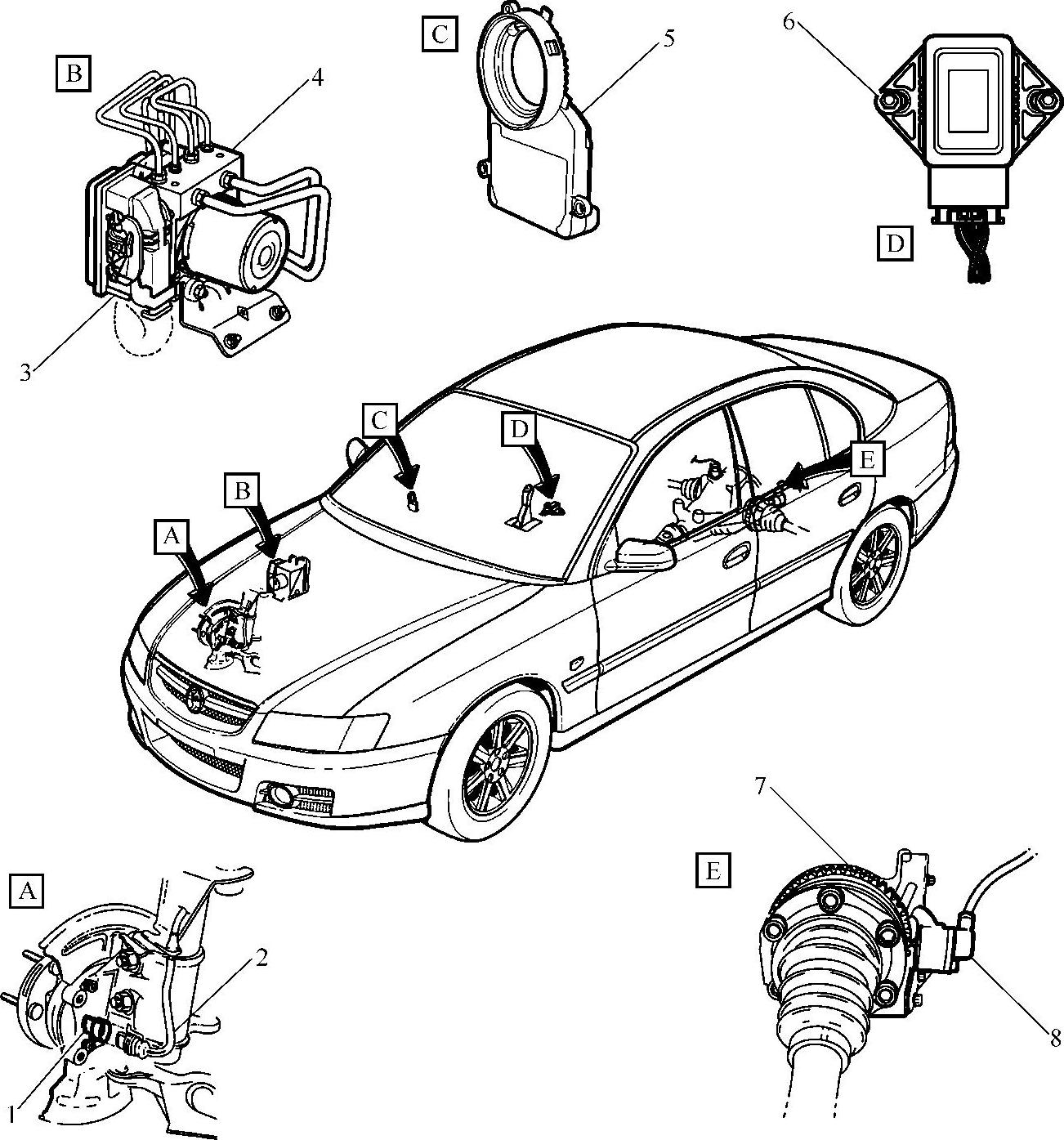
图7-1 别克荣御轿车电子稳定系统零件位置及其组成
1—前轮轮速传感器2—前轮轮速传感器接线3—电子控制单元(ECU)4—液压调节器总成5—转向盘转角传感器6—横向偏摆率传感器7—后轮轮速传感器脉冲环8—后轮轮速传感器
1.轮速传感器
轮速传感器是一个电磁式传感器,装在每个车轮的相应位置上,用于检测车轮旋转的角速度。
前轮轮速传感器是前轮轮毂总成的一部分,前轮轮毂总成是一台永久性的密封装置。左
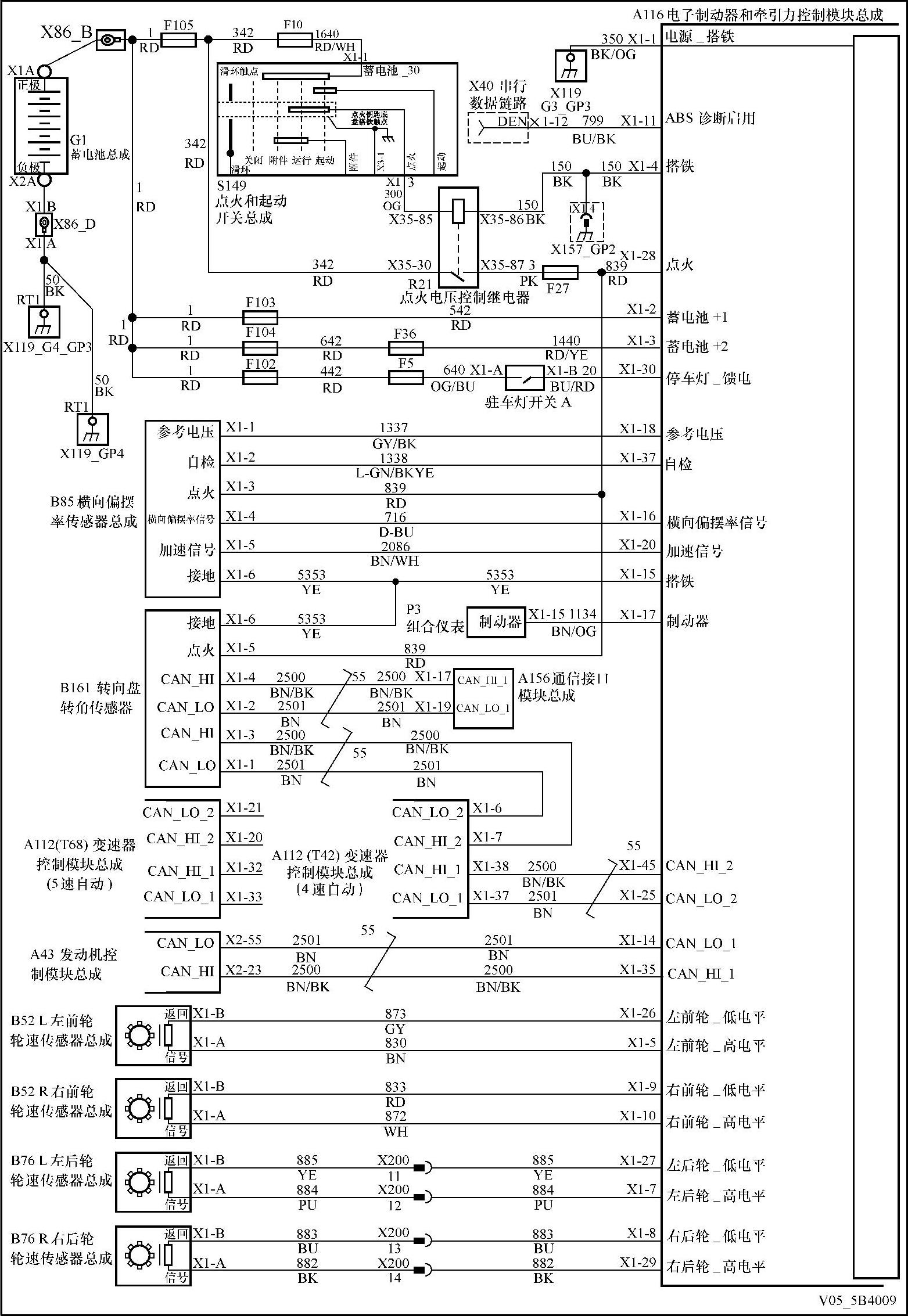
图7-2 电子控制系统电路
前和右前轮轮毂各装有一个车轮轮速传感器和一个48齿的磁脉冲信号环。
别克荣御轿车采用后轮驱动,后轮轮速传感器位于主减速器后盖的支架上,左、右各有一个。后轮轮速传感器脉冲环是主减速器内车桥法兰的一部分,不能单独维修。前、后轮速传感器的位置分别如图733和图734所示。
图7-3 前轮轮速传感器
1—前轮轮速传感器2—前轮毂总成
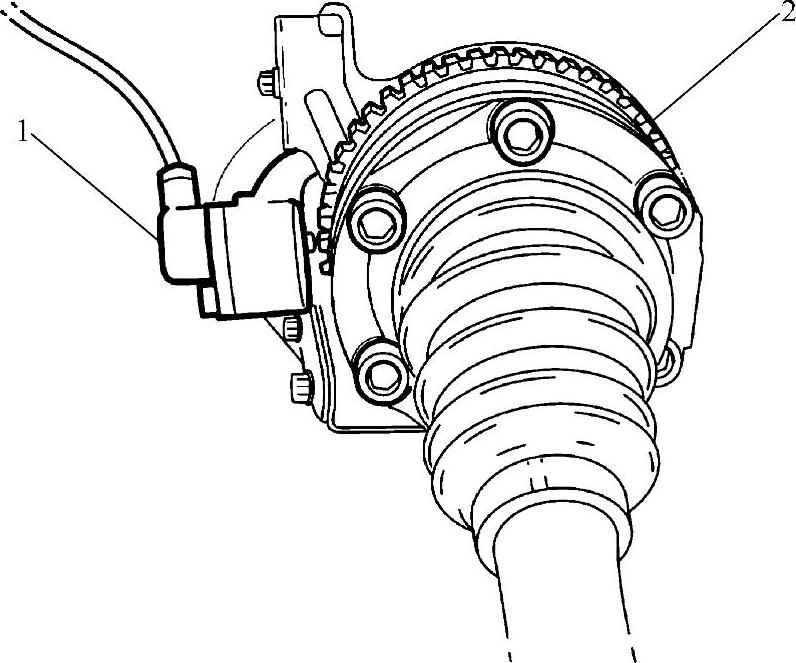
图7-4 后轮轮速传感器
1—后轮轮速传感器2—传感器脉冲环
如图735所示,轮速传感器与脉冲环配合在一起产生一个交流信号电压,该信号的幅值和频率与车轮速度成比例。轮速传感器正弦波图比较了高速和低速时轮速传感器产生的信号。图735波形图中的实线表示高速时轮速传感器产生的电压与时间的关系。虚线表示低速时轮速传感器产生的电压与时间的关系。轮速传感器产生的信号被发送到电子控制单元(ECU),电子控制单元利用这个信号来确定每个车轮的转速。
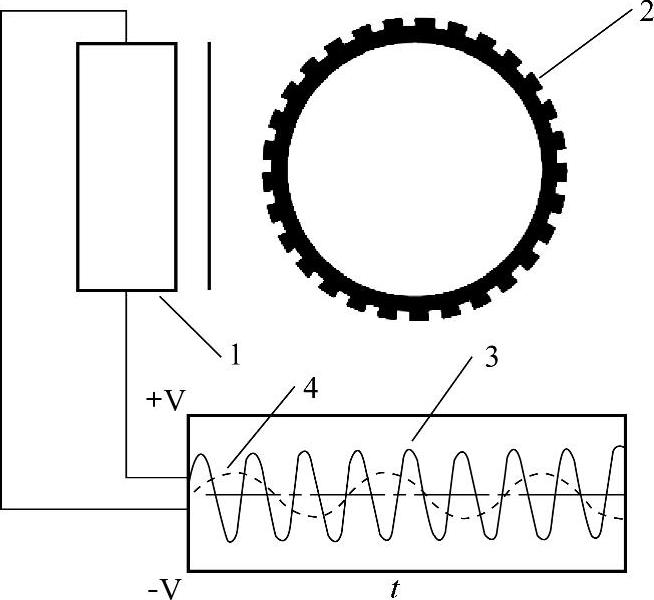
图7-5 轮速传感器的工作机理
1—轮速传感器2—脉冲环3—高速时轮速传感器产生的电压与时间的关系4—低速时轮速传感器产生的电压与时间的关系
2.横向偏摆率传感器
横向偏摆率传感器一般装在汽车行李舱前部,与汽车垂直轴线平行,用于检测汽车横向偏摆率(汽车绕垂直轴旋转的速度)。
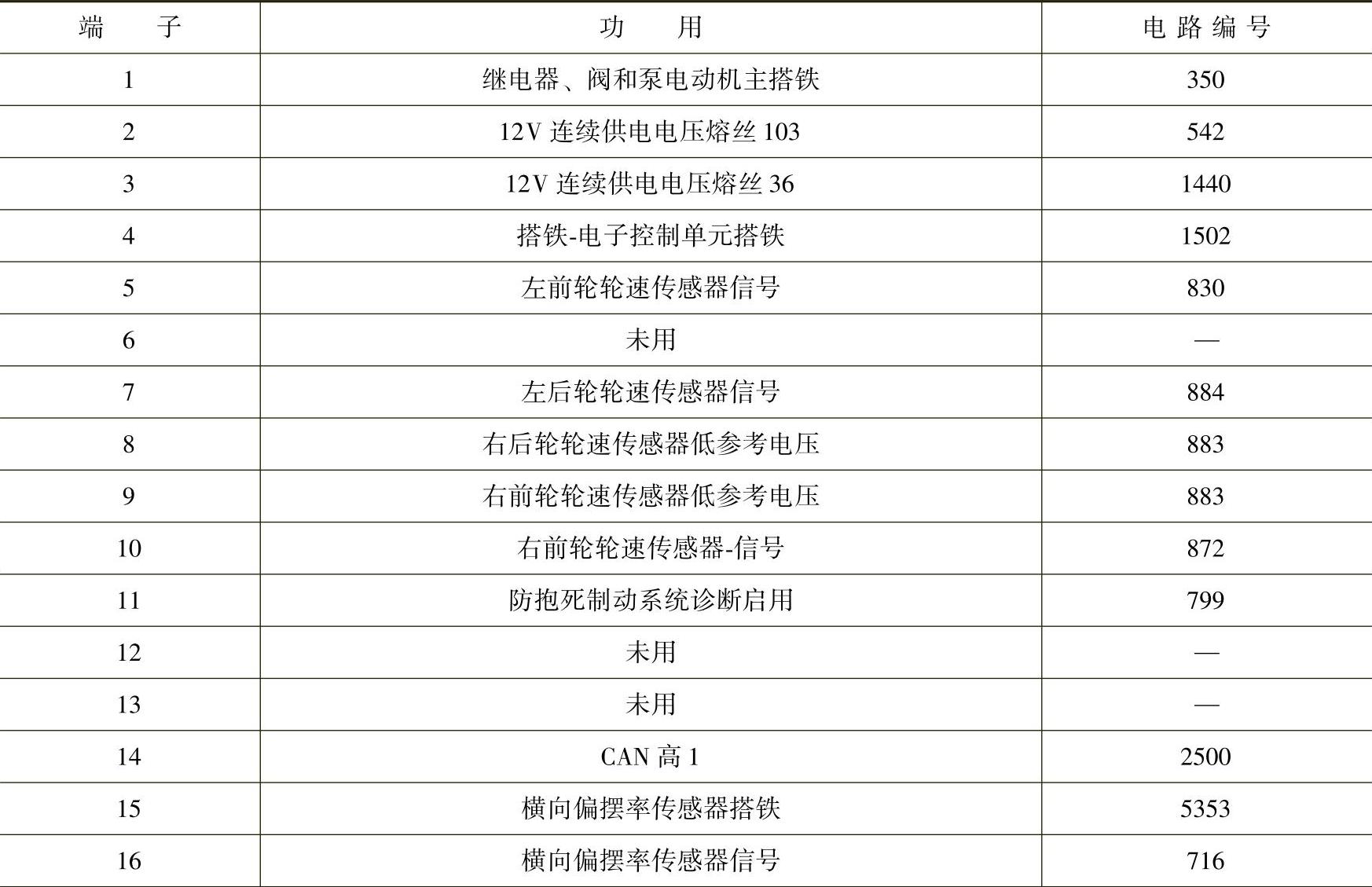
别克荣御轿车横向偏摆率传感器位于仪表板中央控制台的下部。横向偏摆率传感器总成包括两个部件,一个是横向偏摆率传感器,另一个是横向加(减)速度传感器。横向偏摆率传感器根据车辆绕其纵轴的旋转角度产生对应的输出信号电压;横向加(减)速度传感器用于检测汽车的纵向和横向加速度,根据车轮侧向滑移量产生对应的输出信号电压。ESP ECU利用横向偏摆率传感器和横向加速度传感器输出的这两个电压信号,计算出车辆的实际行驶状态,再结合车轮轮速传感器的输出信号和转向盘转角传感器的串行数据输出信号,确定控制目标。横向偏摆率传感器如图736所示,传感器插头端子排列如图737所示,各端子的作用见表731。
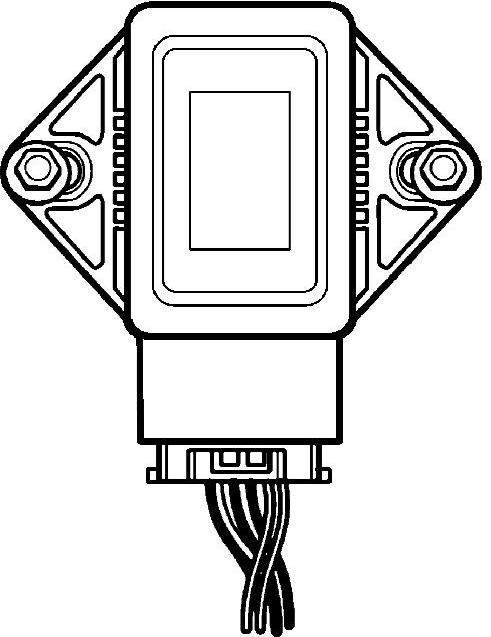
图7-6 横向偏摆率传感器
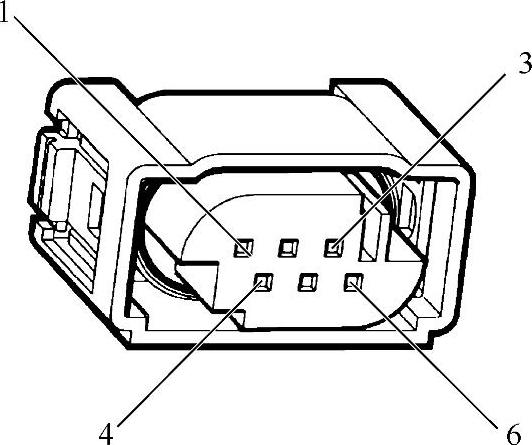
图7-7 横向偏摆率传感器各端子排列
表7⁃1 横向偏摆率传感器各端子的作用

(1)横向加速度传感器 图738为横向加速度传感器原理示意图。从图中可以看出,横向加速度传感器由连接在固定侧板上的差分电容和质量板组成,质量板在其质心用弹簧悬挂在车架上。
当车辆静止时(图7-8a),质量板和两个侧板之间的距离是相等的。因此,两个电容之间的电容值是相等的,横向加速度传感器的输出信号电压为0。
当车辆加速时(图7-8b),侧板随车辆C一起移动,而由弹簧悬挂的质量板D趋向于朝相反方向移动。因此,质量板和侧板之间的距离与车辆横向加速度的大小成比例变化。

图7-8 横向加速度传感器原理示意图
1—固定侧板2—质量板
这样就改变了两个电容间的电容值,从而使横向加速度传感器产生一个幅值与质量板的移动量成比例的信号电压。
(2)横向偏摆率传感器 横向偏摆率传感器的组成如图739所示,横向偏摆率传感器包括以下零件:2个晶振板,在其质心用弹簧悬挂;加速度传感器,集成在晶振板内;永久磁铁为晶振板提供一个磁场。
当晶振板处在磁场中时,电流施加到晶振板上,使晶振板以恒定的振幅(W)运动。
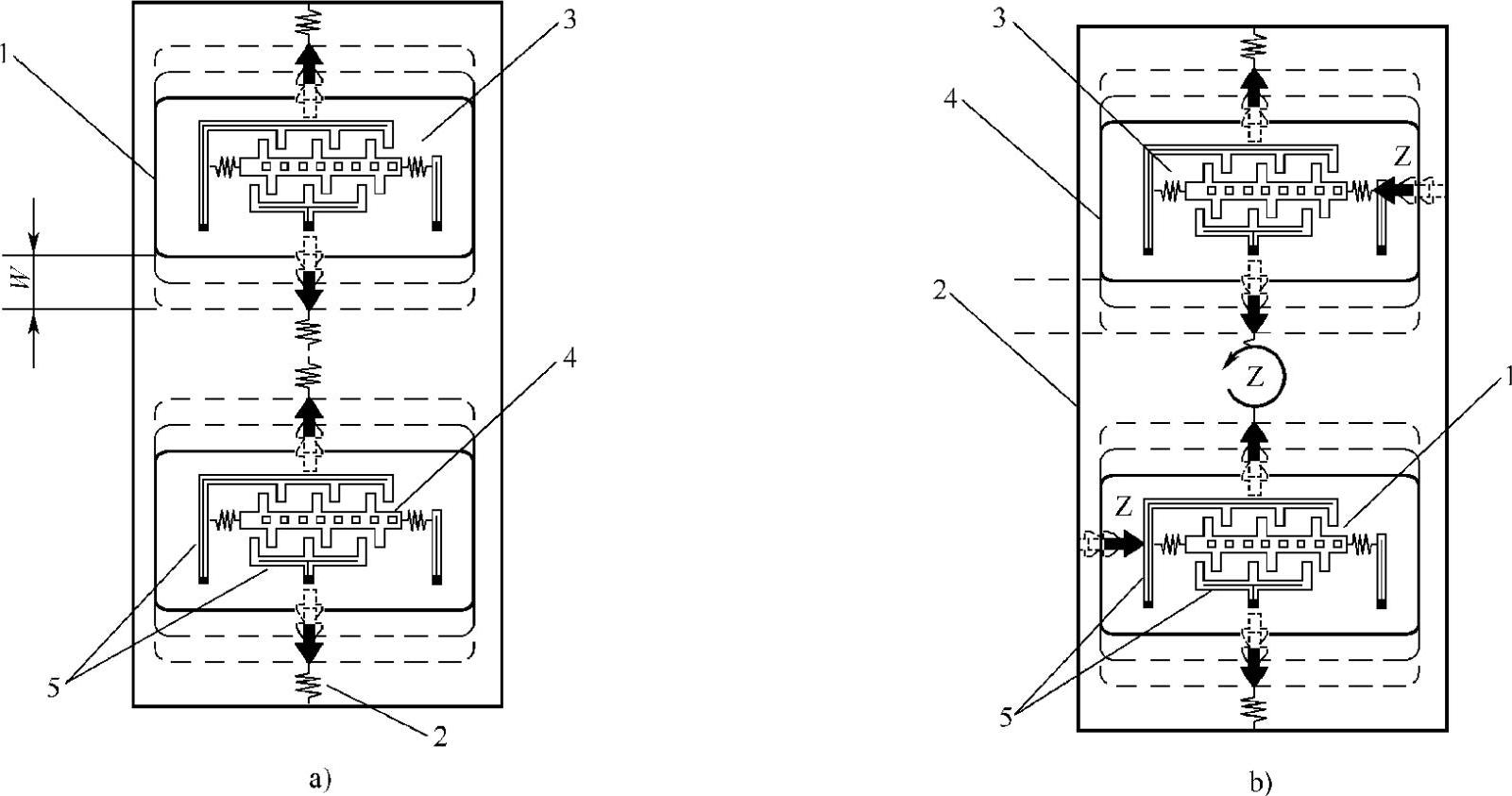
图7-9 横向偏摆率传感器工作过程
a)车辆直线行驶时b)车辆绕其纵轴旋转时1—晶振板2—弹簧3—加速度传感器4—质量板5—侧板
当车辆沿直线向前行驶且没有横向力施加到加速度传感器上时,加速度传感器的质量板和侧板之间的距离是相等的。因此,电容间的电容值是相等的,加速度传感器的输出信号电压为0。
当车辆绕其纵轴旋转时,会出现以下情况:固定在车辆上的横向偏摆率传感器总成随车辆一起转动,但质量板除外;由弹簧悬挂且随晶振板一起移动的质量板趋向于在当前位置摇摆,而固定的侧板随车辆一起旋转。因此,质量板和固定侧板之间的距离与车辆绕其纵轴旋转的角度成比例。这样就改变了两个电容板之间的电容值,从而使加速度传感器产生一个幅值与质量板的移动量成比例的信号电压。
横向偏摆率传感器的判断电路比较并判断两个加速度传感器的输出信号,以计算车辆绕其纵轴Z旋转的量。3.转向盘转角传感器
转向盘转角传感器装于转向盘后侧,如图7310所示,用于检测转向盘的转向角度,可根据转向盘的转动情况输出表示转向盘旋转角度的输出信号,电子控制单元利用这个信息计算出驾驶人想要的方向。具体结构如图7311所示,插头端子视图如图7312所示,各端子的作用见表732。

图7-10 转向盘转角传感器的位置
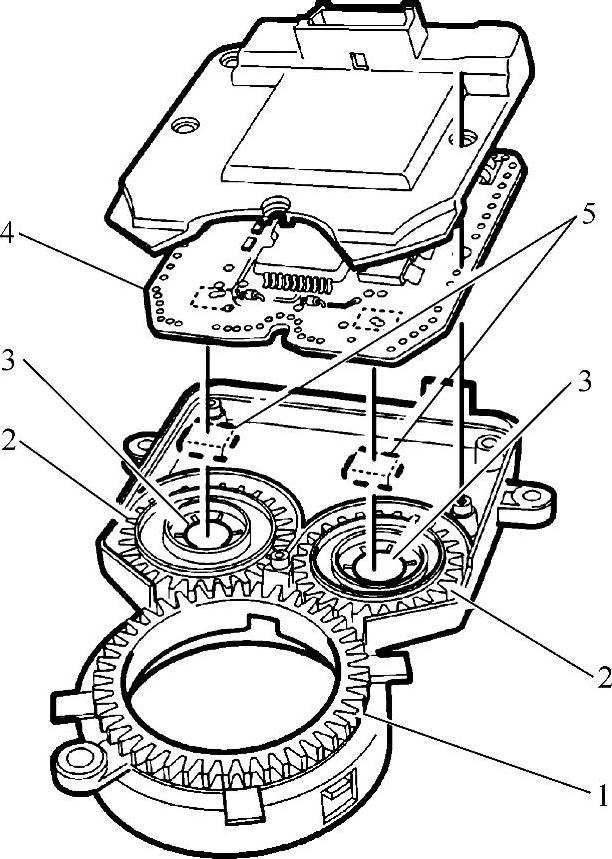
图7-11 转向盘转角传感器(www.zuozong.com)
1—齿轮2—测量齿轮
3—磁铁4—判断电路5—各向异性磁阻(AMR)集成电路
图7-12 转向盘转角传感器端子视图
表7⁃2 转向盘转角传感器各端子的作用

(1)检测原理 由于两只测量齿轮的齿数不同,故产生不同相位的两个转角信号,即能产生一个可表示±760°转向盘旋转角度的输出信号,电子控制单元利用这个信息计算出驾驶人所要求的方向。电子控制单元通过转向盘转角传感器与横向偏摆率传感器信号的比较,确定车辆实际行驶轨迹与驾驶人的要求是否一致,从而确定控制目标。 (2)各向异性磁阻集成电路 各向异性磁阻(AMR)集成电路(IC)包括8个各向异性磁阻元件,这8个元件组成2个惠斯顿电桥。其中一个惠斯顿电桥与另外一个成45°安装,这使得各向异性磁阻(AMR)集成电路(IC)能产生正弦和余弦输出信号。各向异性磁阻元件根据施加到各向异性磁阻(AMR)集成电路(IC)上的磁场的角度变化而改变电阻,与磁场极性无关。
转向盘转角传感器的判断电路判断并合成各向异性磁阻(AMR)集成电路(IC)的输出信号,以产生两个相同的线性输出信号(A),表示磁场旋转360°。各向异性磁阻元件的全极性将单个各向异性磁阻集成电路的信号输出范围限制在0°~180°内,如图7313所示。 测量齿轮磁铁所产生磁场的角向与转向盘的角位相对应。该磁场改变各向异性磁阻元件的电阻值,使各向异性磁阻集成电路产生一对输出信号。两个测量齿轮之间的转速差使第二个各向异性磁阻集成电路的信号输出范围比第一个各向异性磁阻集成电路的信号输出范围要短。判断电路4比较并判断这一差别以及两个各向异性磁阻集成电路输出信号在对比点5处
的变化率,从而计算出精确的转向盘角位。
(3)转向盘转角传感器的布局 为了增大转向盘转角传感器的输出信号范围,并使其能产生一个可表示±760°转向盘旋转角度的输出信号,转向盘转角传感器上安装了2个各向异性磁阻集成电路。向各向异性磁阻集成电路提供磁场的磁铁安装在主测量齿轮和次测量齿轮上。与主测量齿轮相比,次测量齿轮少2个齿。这使得测量齿轮以不同的速度旋转,其检测原理如图7314所示。
(4)转向盘转角传感器的校准 电子控制单元监测并判断转向盘转角传感器的输出信号。当车辆沿直线行驶了15min或以上时,电子控制单元会将该行驶方向设定为正向前方向。如果电子控制单元检测到转向盘转角传感器角向偏离正向前方向,则电子控制单元将执行下列功能:
1)如果偏离度等于或小于15°,则电子控制单元自动执行转向盘转角传感器校准。
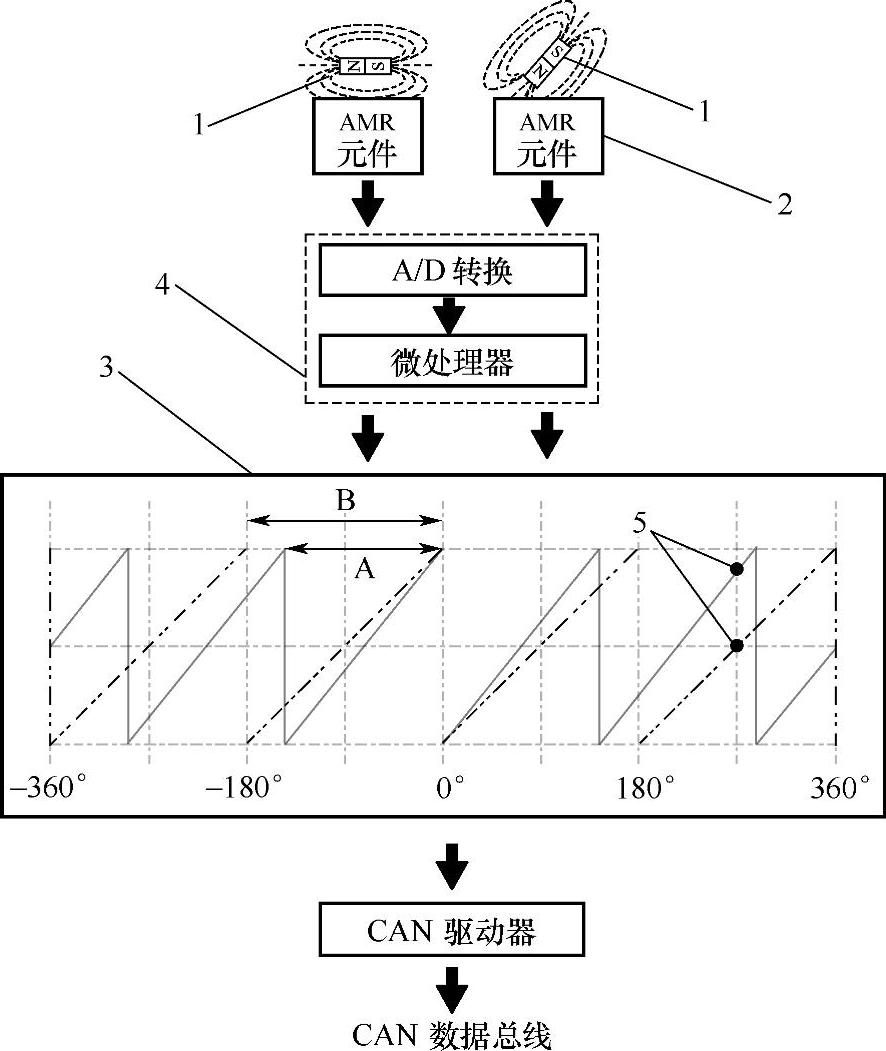
图7-13 转向盘转角传感器的内部结构
1—测量齿轮磁铁2—异性磁阻元件3—输出信号4—判断电路5—输出信号的对比点
2)如果偏离度大于15°,则设置DTC C0460“转向盘转角传感器故障”。转向盘转角传感器可使用故障诊断仪Tech2重新校准。
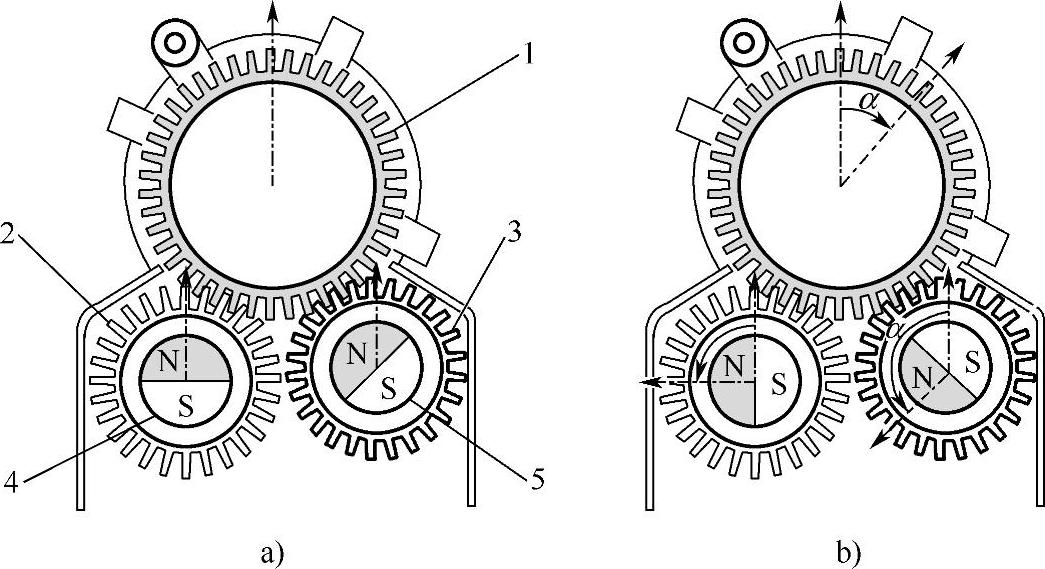
图7-14 转向盘转角传感器的检测原理
a)基准位置b)旋转角度α后的位置1—磁铁2—主测量齿轮3—次测量齿轮4—主测量齿轮磁铁5—次测量齿轮磁铁
4.液压控制装置
液压控制装置在正常情况下执行制动助力功能;当车轮在加速或减速过程中出现滑移时,执行TRC和ABS功能;当汽车出现侧滑时,液压控制装置把受到控制的制动液压加到每个车轮上。
液压调节器总成内部液压回路示意图如图7315所示。为了能独立控制各车轮的制动回路,别克荣御轿车的液压控制装置采用了前、后分离的四通道回路结构,每个车轮的液压制动回路都是隔离的,这样当某个制动回路出现泄漏时其他制动回路仍能继续制动。液压调节器总成根据电子控制单元发送的控制信号调节制动液压力。液压调节器总成包括回程泵、电动机、蓄能器、进口阀、出口阀、隔离阀和后起动阀等部件。
在ABS3TCS/ESP减压阶段,两个回程泵从蓄能器和制动钳抽取过量的制动液,然后通
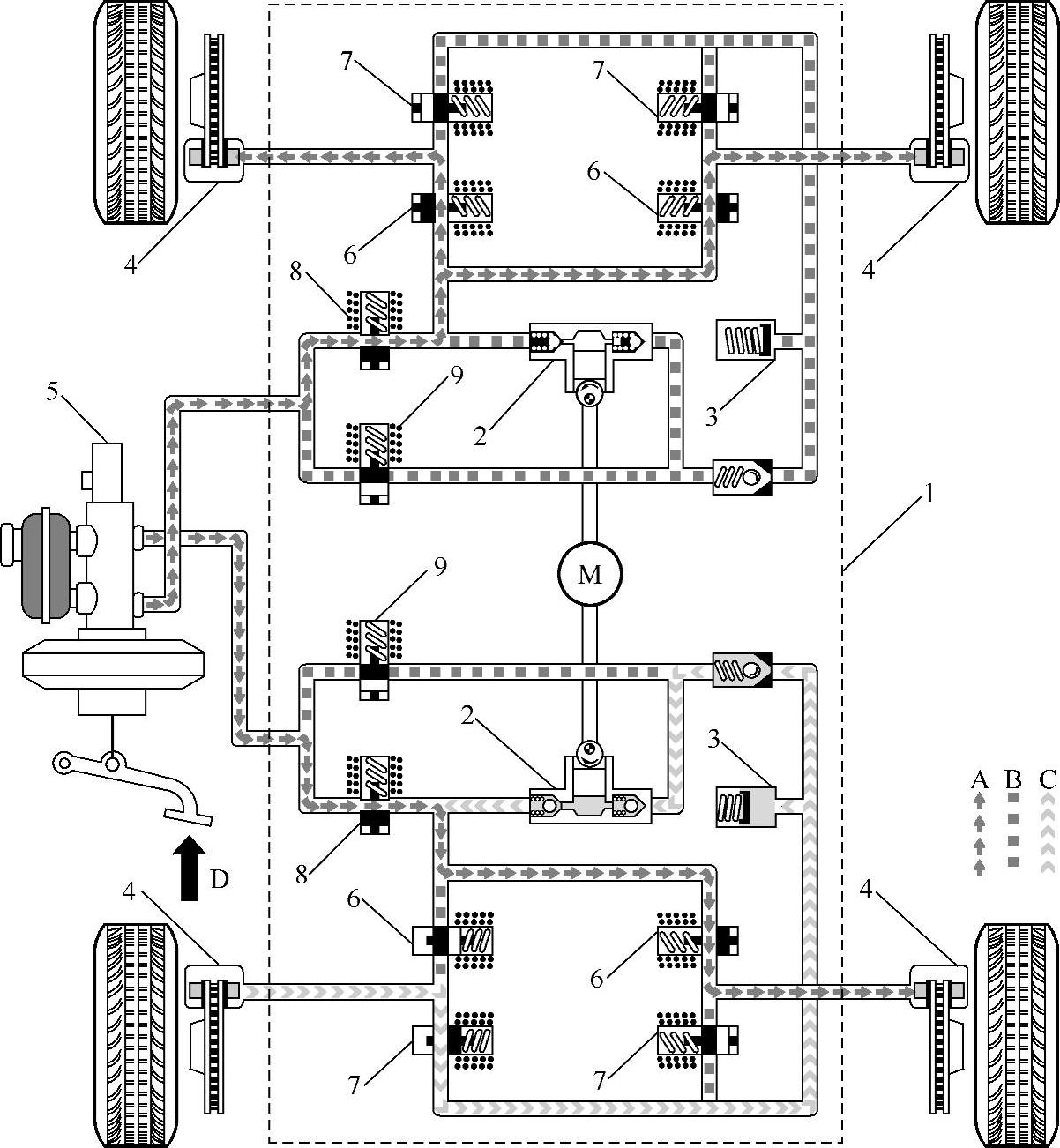
图7-15 液压调节器总成内部液压回路示意图
1—液压调节器总成2—回液泵3—蓄能器4—制动钳5—制动主缸6—进口阀7—出口阀8—隔离电磁阀9—起动电磁阀A—常规的制动液压力B—停止的制动液压
力流(电磁阀闭合)C—泵产生的制动液压力流D—制动踏板踩下M—电动机
过液压调节器将制动液返回到制动主缸以减小制动液压力。另外,回程泵还可以在制动干预阶段向制动钳施加制动液压力。电动机用于驱动回液泵。蓄能器在ABS3TCS/ESP减压阶段存储过量的制动液,从而使液压调节器能够即时减小制动液压力。进口阀是常开阀,在常态位置时,各进口阀使制动液压力施加到制动钳上,当阀动作时,各进口阀将制动钳与制动主缸隔离开来。出口阀是常闭阀,在常态位置时,各出口阀将制动钳与蓄能器及回液泵隔离开来,当阀动作时,各出口阀将过量的制动液直接引至蓄能器和回程泵,从而使压力减小。隔离阀动作时,将后制动回路与制动主缸隔离开来,从而防止了制动液在牵引力控制系统工作期间回流至制动主缸。后起动阀用于在牵引力控制系统工作期间使制动液从制动主缸流至液压泵中。别克荣御轿车的液压控制装置如图7316所示。5.电子控制单元
电子控制单元将传感器采集到的数据进行计算,计算出车身状态然后跟存储器中预先设定的数据进行对比。当电子控制单元计算数据超出存储器预存的数值,即车身临近失控或者已经失控的时候,则命令执行器工作,以保证车身行驶状态能够尽量满足驾驶人的意图。电子控制单元如图7316所示,其插头端子视图如图7317所示,各端子的作用见表733。电子控制单元是ABS3TCS/ESP系统的控制中心,别克荣御轿车的电子控制单元与液压控制装置集成在一起组成一个总成。电子控制单元持续监测并判断的输入信号有:蓄电池电压、车轮转速、转向盘转角、横向偏摆率以及点火开关状态、驻车灯开关状态、串行数据通信电路等信号。根据所接收的输入信号,电子控制单元将向液压控制装置、发动机控制模块、组合仪表和串行数据通信电路等发送控制信号。
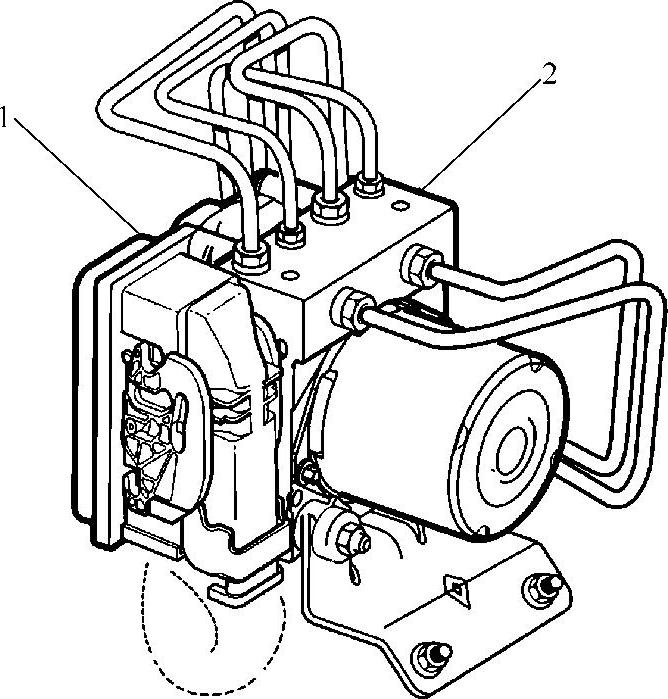
图7-16 别克荣御轿车的液压控制装置
1—电子控制单元(ECU)2—液压控制装置
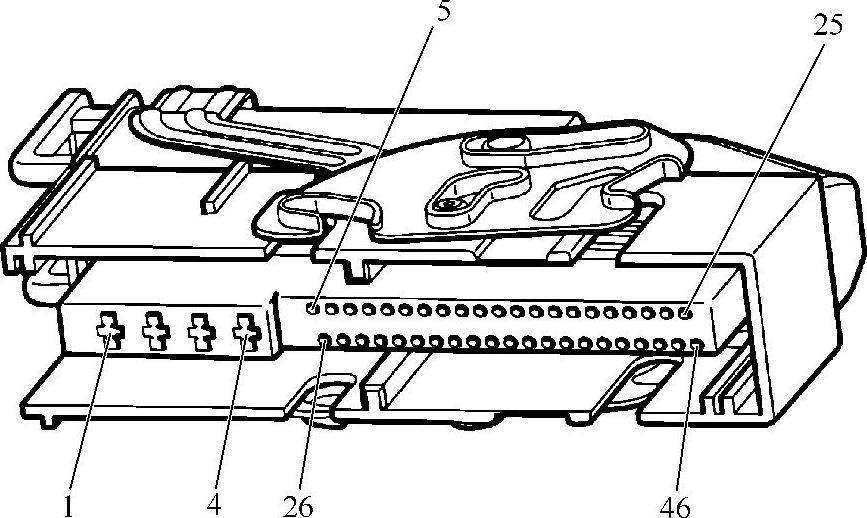
图7-17 电子控制单元(ECU)插头端子视图
表7⁃3 电子控制单元(ECU)各端子的作用
(续)

别克荣御轿车的电子控制单元是ABS3TCS/ESP的控制中心。当点火开关接通时,电子控制单元会不断进行自检,以检测并查明ABS3TCS/ESP的故障。此外,电子控制单元在每个点火循环都执行自检初始化程序。当车速达到约15km/h时,初始化程序即启动。在执行初始化程序时,可能会听到或感觉到程序正在运行,这属于系统的正常操纵。在执行初始化程序的过程中,电子控制单元将向液压调节器发送一个控制信号,循环操纵各个电磁阀并运行泵电动机,以检查各部件是否正常工作。如果泵或任何电磁阀不能正常工作,电子控制单元会设置一个故障码。当车速超过15km/h时,电子控制单元会将输入和输出逻辑序列信号与电子控制单元中所存储的正常工作参数进行比较,以此来不断监测ABS3TCS/ESP。如果有任何输入或输出信号超出正常工作参数范围,则电子控制单元将设置故障码。6.制动液压传感器
制动液压传感器一般装于液压控制装置上部,检测驾驶人进行制动操纵时的制动液压力。7.节气门位置传感器节气门位置传感器装于节气门体上,检测节气门的开度。8.节气门执行器节气门执行器在汽车电子稳定系统控制发动机功率时,控制节气门开度大小。9.警示装置警示装置主要指仪表板上的ESP警告灯。10.ESP开关
别克荣御轿车的ESP开关位于地板控制台上,如图7318所示。该开关是一个瞬间接触开关,按一下ESP开关,电子稳定程序从接通转至关闭。当电子稳定程序关闭时,ABS3TCS仍能正常工作。当ESP处于关闭位置时,再按一下ESP开关,将接通电子稳定程序。按下ESP开关超过60s将被视为短路,会记录故障码,且电子稳定程序在该点火循环内将被禁用。如果没有记录牵引力控制系统当前的故障码,电子稳定程序将在下一个点火循环复位到接通状态。11.驻车灯开关
驻车灯开关(图7319)是一个常开开关,在制动踏板被踩下时闭合。电子控制单元利用驻车灯开关的信号电压来确定制动踏板是否被踩下。
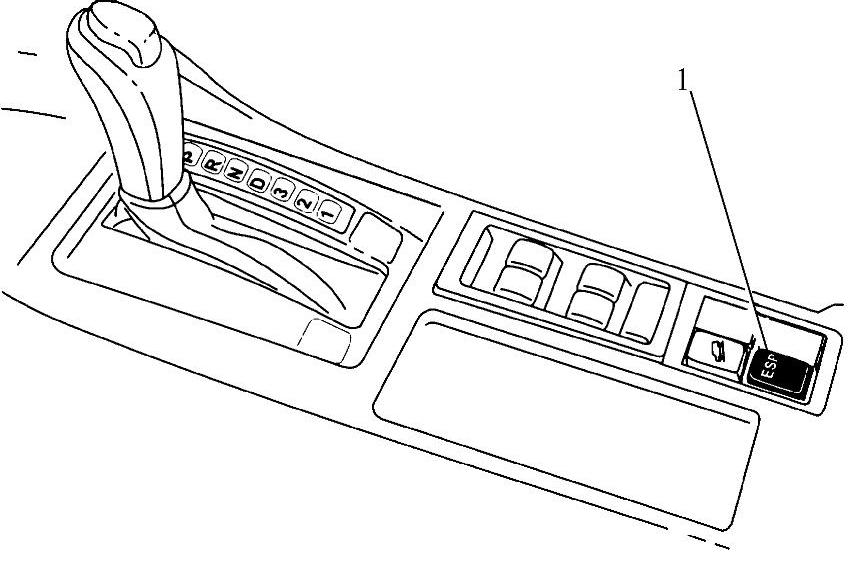
图7-18 ESP开关
1—ESP开关
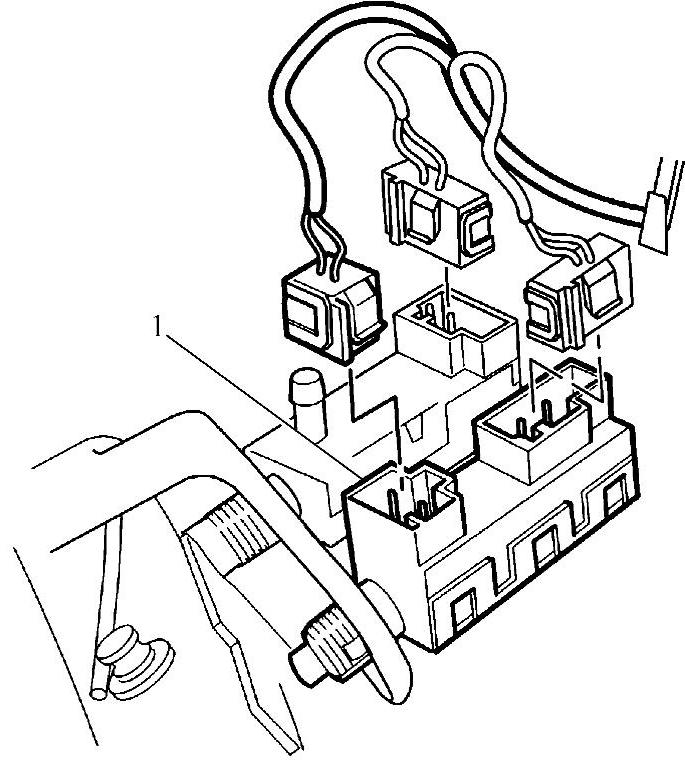
图7-19 驻车灯开关
1—驻车灯开关插接器
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。