



如图11-29a所示,后车驾驶人已经激活自适应巡航控制系统,并选定了巡航车速v和巡航车距Dw,后车已经加速到了选定巡航车速。
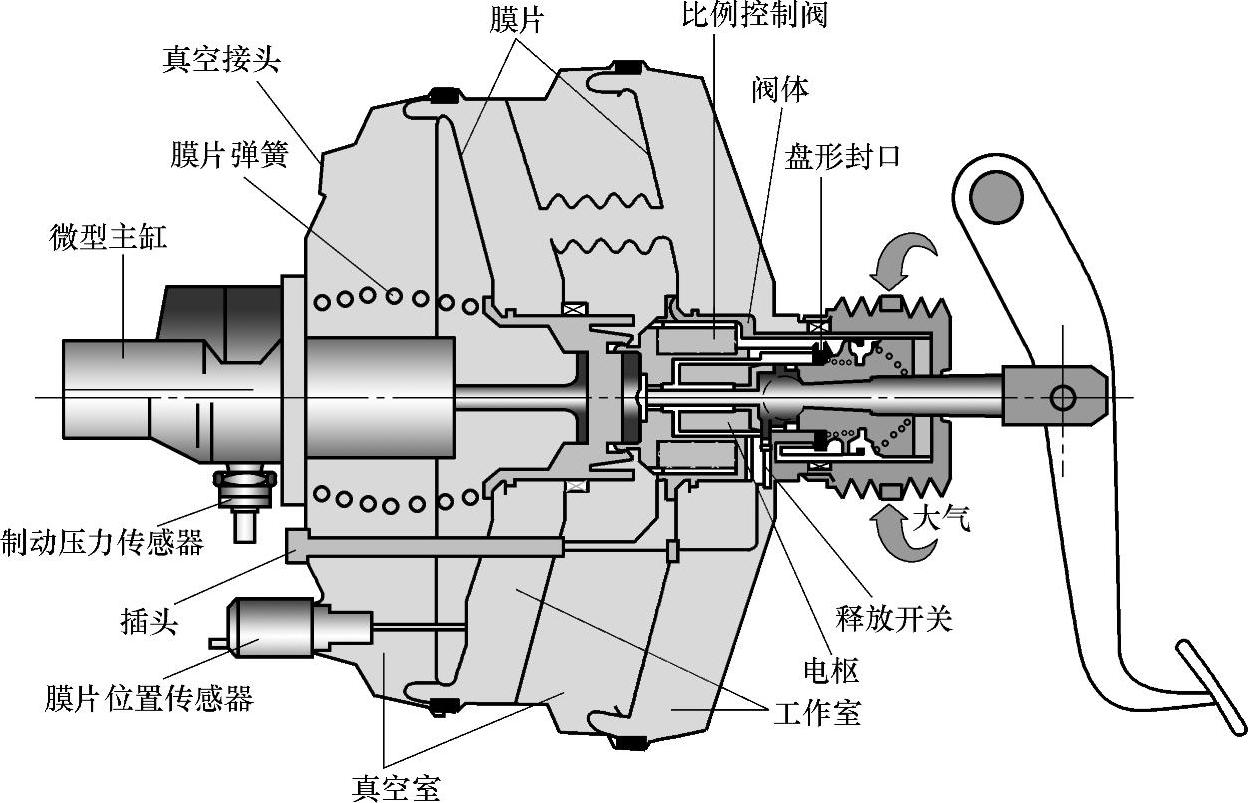
图11-28 电子制动助力器
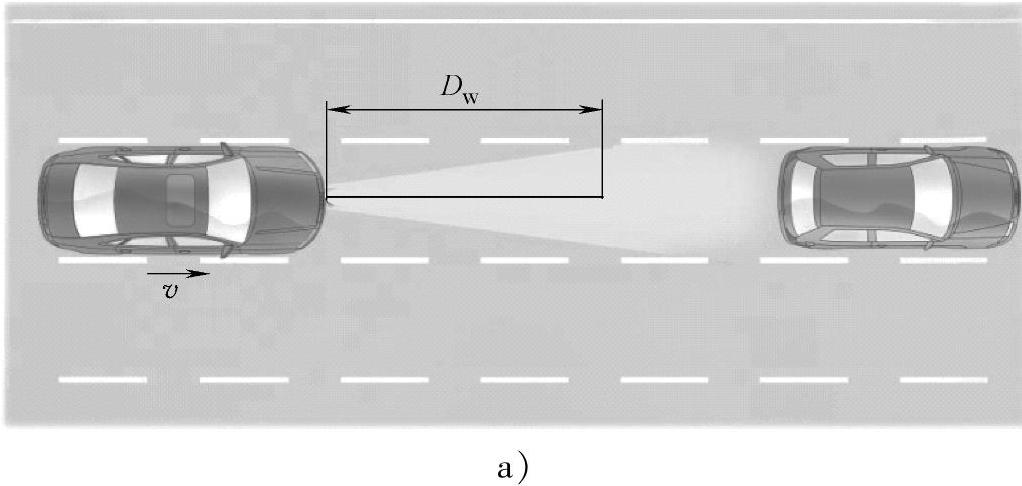
图11-29 自适应巡航系统控制原理
后车识别出前车与自己行驶在同一条车道上,于是后车通过松加速踏板,必要时也会施加制动来减速,直至两车之间的距离达到设定的巡航距离,如图11-29b所示。
如图11-29c所示,如果这时有另一辆车(摩托车)闯入两车之间,自适应巡航系统施加的制动就不足以使后车和摩托车之间的距离达到设定的巡航车距,于是就有声、光报警信号来提醒驾驶人,此时应踏下制动踏板施加制动。(www.zuozong.com)
如图11-29d所示,如果前车驶离车道,那么雷达传感器会侦测到这一情况,于是后车又开始加速,直至达到设定的巡航车速。
通过车距传感器的反馈信号,ACC控制单元可以根据靠近车辆物体的移动速度判断道路情况,并控制车辆的行驶状态;通过反馈式加速踏板感知的驾驶人施加在踏板上的力,ACC控制单元可以决定是否执行巡航控制,以减轻驾驶人的疲劳。
自适应巡航控制系统一般在车速大于25km/h时才会起作用,而当车速降低到25km/h以下时,就需要驾驶人进行人工控制。
通过系统软件,自适应巡航控制系统可以实现“停车/起步”功能,以应对在城市中行驶时频繁地停车和起步情况。自适应巡航控制系统的这种扩展功能,可以使汽车在非常低的车速时也能与前车保持设定的距离。当前方车辆起步后,自适应巡航控制系统会提醒驾驶人,驾驶人通过踩加速踏板或按下按钮发出信号,车辆就可以起步行驶。
自适应巡航控制系统使车辆的编队行驶更加轻松。ACC控制单元可以设定自动跟踪的车辆,当本车跟随前车行驶时,ACC控制单元可以将车速调整为与前车相同,同时保持稳定的车距,而且这个距离可以通过转向盘附近的控制杆上的设置按钮进行选择。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。