



CAN是一种面向比特流的线性总线,确定最大的比特率为1Mbit/s。CAN采用CSMA/CA总线访问方法以及错误识别。所有的控制器要求在比特时间内作出反应,因此总线长度越小,比特率就越高。约定的条件是:

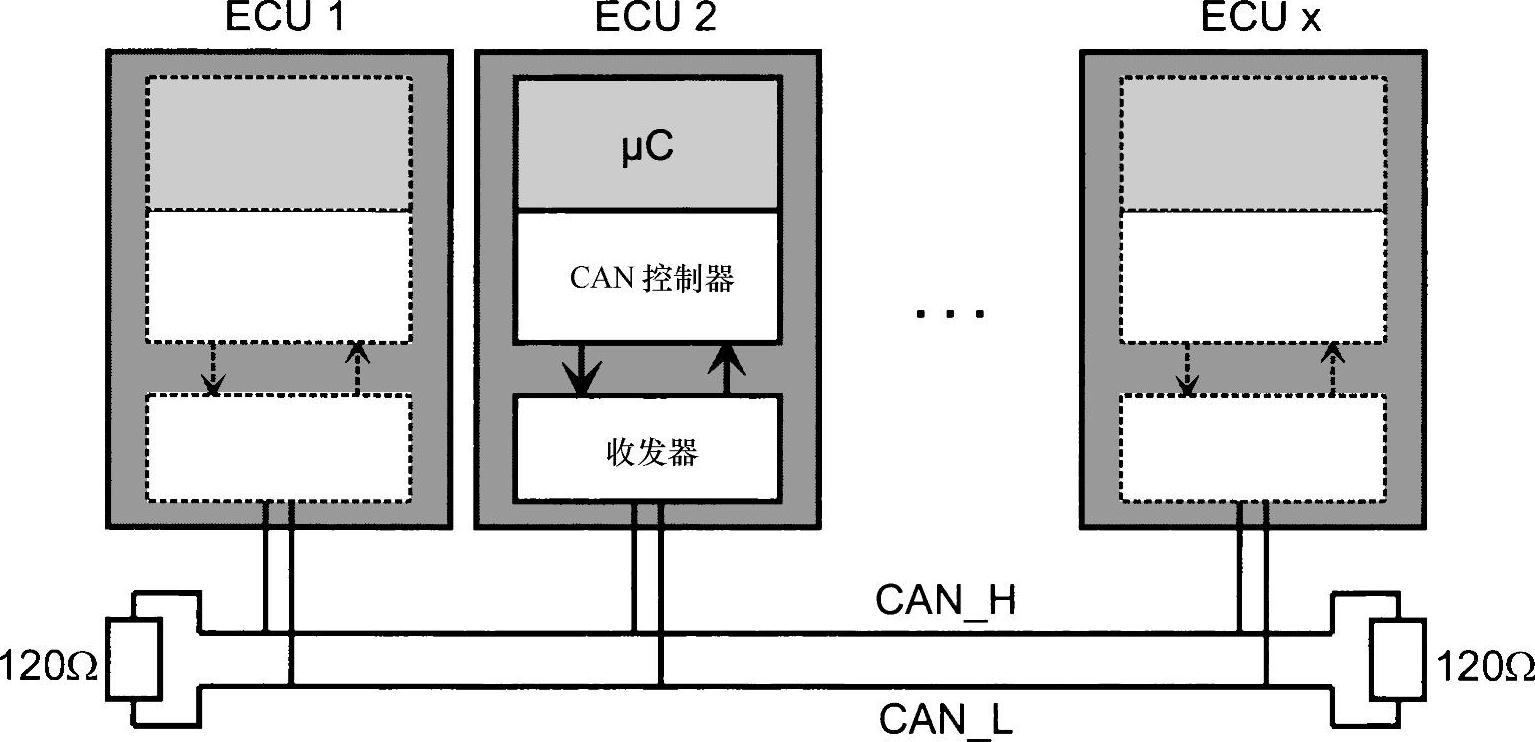
图3-3-1 高速CAN总线
但这个范围只是一个经验值,因为在较高的比特率时,总线的收发器有时间上的延迟,在自动化技术中,需要很长的总线长度。偶尔采用中继器,允许总线长度变短和降低比特率。所有的总线控制器必须工作在同一个比特率下。
CAN-ISO标准附加ISO 11898—2和ISO 11898—5标准,对于比特率≥250kbit(高速CAN,即C级网)的数据传输,规定了采用绞合双绝缘导线。作为实际的线形总线,用最长30cm的分支线接到每个控制器上。总线的两末端用波阻抗接到双绝缘导线传输线上,典型的值约为120Ω,见图3-3-1。差分电压信号的偏移约为2V(图3-3-2)。当双绝缘导线传输线中断或线芯短路时,总线就断开。在比特传输率为500kbit/s的PKW的传动系统中和具有250kbit/s比特率商用车中,都采用高速CAN总线(即C级网)。这种比特率也能用SAE标准对PKW中的CAN(SAE J2284)和LKW中的CAN(SAE J1939)进行标准化。
在附加的ISO 118983中,针对比特率不大于125kbit/s的应用,如车身技术,要采用低速CAN,即B级网,同样规定传输线使用双绝缘导线。由于比特率较低,允许相应的总线可以长一些,总线两末端电阻和短分支线的限制可以去掉。差分电压信号的偏移,明显比高速CAN大(图3-3-2)。在电缆中断或短路时,总线仍能工作。在欧洲的车辆中,在车身技术方面一般采用100~125kbit/s的低速CAN。
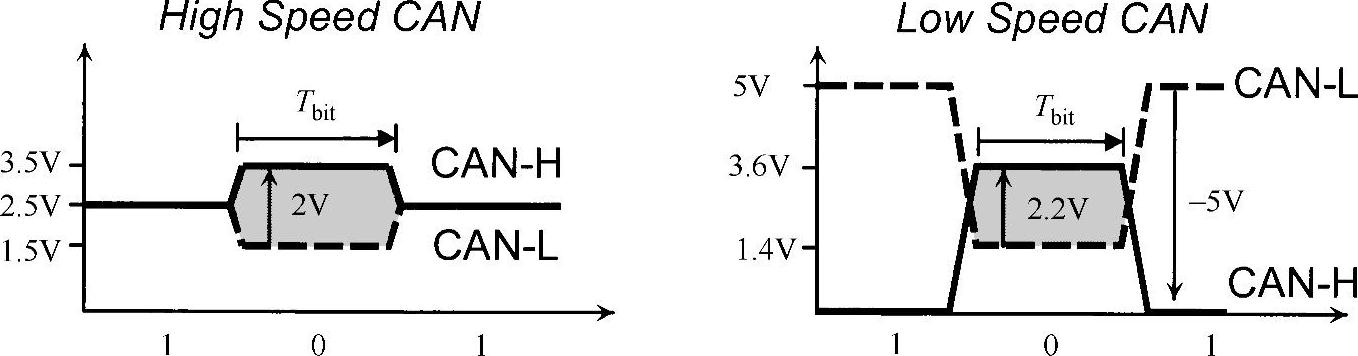
图3-3-2 基于ISO 11898—2和ISO 11898—3的高速和低速CAN信号电平(www.zuozong.com)
在SAE J2411中,规定采用33kbit/s的比特率(在GM中应用),83kbit/s(在Chryster中)的单绝缘导线,信号偏移为5V(单绝缘导线CAN)。
牵引车和挂车的连接,按ISO 11992规定采用125kbit/s的比特率的点对点双绝缘导线,信号电平规定采用电池电压数量级。
对于商用车中的应用,SAE J1939/11规定了固定比特率为250kbit/s的总线连接系统。它与基于ISO 11898—2的高速CAN规程,很大程度上是一致的。但是屏蔽的双绝缘导线传输线要求总线长度最大为40m,最多可连接30个控制器。在SAE J1939/12中规定了不带屏蔽电缆的变量。标准SAE J1939/21规定数据链路层对应随后要描述的CAN2.0B。
CAN总线到车辆的连接一般是通过标准的控制器插座来完成的。对于自动化技术CAN(CiA),按推荐CiA DS 102规定了物理层的比特率为10kbit/s~1Mbit/s。这一点与ISO 11898—2相类似。DeviceNet采用125~500kbit/s。在自动化技术中,CAN总线的连接是9针Sub-Miniatur-D插座或不同的其他插座类型。
对于所有CAN总线,在市场上都有适合的收发器构件。物理层上不同的变量,相互之间是不兼容的,因为信号电平相互间是不同的(图3-3-2)。在所有的情况下,信号电平产生高欧姆值的(在总线上隐性)定义为逻辑“1”,相反低欧姆值的(在总线上是显性)定义为逻辑“0”。
和简单的UART相反,在大多数CAN控制器中,对总线信号的采样点,能够也必须由用户调整(图3-3-3)。时钟周期,用量子TQ表示。由比特时钟Tbit导出,在第一个TQ内,即同步段TSyncSeg,由发送端给出信号脉冲。在接收端和发送端的两个收发器上的信号延迟,包括在传输线上的,都要被考虑进去,称为传输时间段TPropSeg。因为CAN总线是一种按位仲裁,所以TSyncSeg+TPropSeg至少是最大信号延迟的两倍。位扫描大约在剩余的时间TPhaseSeg1+TPhaseSeg2的中间位置直到位结束完成。这两个时间段的长短,可以由CAN控制器动态地加长或缩短,其目的是使接收端的位时钟自动地与发送端的位时钟相同步。整个适应过程,按TQ的倍数来完成,最大的同步跳跃宽度TSJW=1~min(4TQ,TPhaseSeg1)。因为总线信号对软件研发人员来说是看不清楚的,所以ISO 15765—4对有关的CAN诊断废气系统有不同的推荐。在500kbit/s比特率时,误差为±0.15%。这一点和诊断测试仪的要求是一样的,量子TQ=125ns产生Tbit=16TQ。因此推荐TSeg1=TPropSeg+TPhaseSeg1=12TQ和TSeg2=TPhaseSeg2=3TQ,可用TSJW=3TQ进行调整。
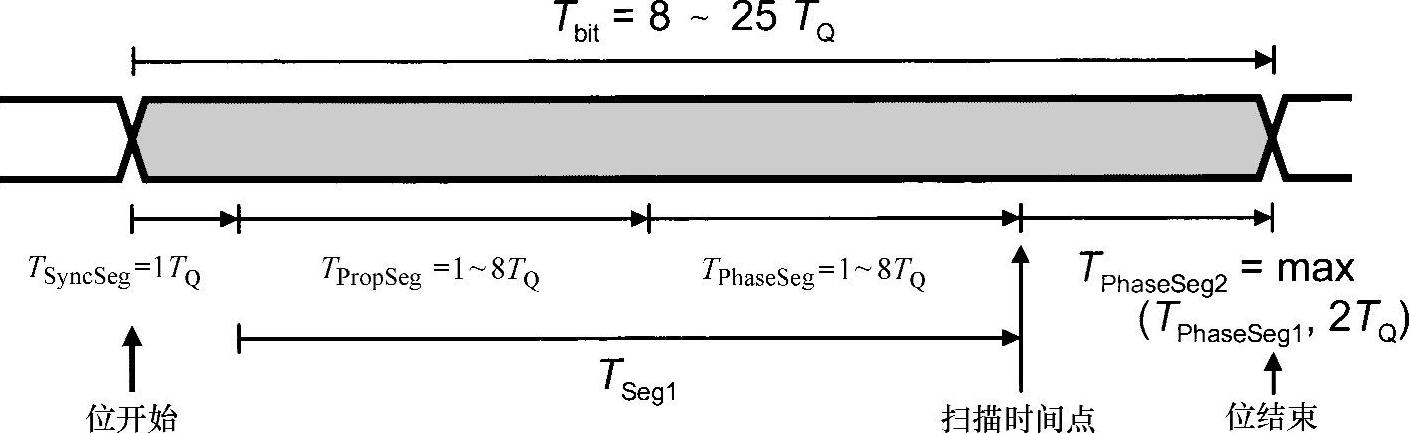
图3-3-3 按时间段分割CAN位
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。