



磁力控制器由主令控制器与PQR10A系列控制盘组成。采用磁力控制器控制时,只有尺寸较小的主令控制器安装在驾驶室内,其余电气设备均安装在桥架上的控制盘中。具有操作轻便、维护方便、工作可靠、调速性能好等优点,但所用电气设备多,投资大巨线路较为复杂。所以,一般桥式起重机同时采用凸轮控制器控制与磁力控制器控制,前者用于平移机构与副钩提升机构,后者用于主钩提升机构。当对提升机构控制要求不高时,则全部采用凸轮控制系统。
图10-7所示为提升机构磁力控制器控制系统电路图。图中主令控制器SA有12对触点,“提升”、“下降”各有6个工作位置。通过这12对触点的闭合与开断,来控制电动机定子与转子电路的接触器,实现电动机工作状态的改变,拖动吊钩按不同速度提升与下降。由于主令控制器为手动操作,所以电动机工作状态的变换是由操作者来掌握的。KM1、KM2为电动机正反转接触器,KM3为制动接触器,控制三相交流电磁制动器YB;KW4、KM5为反接制动接触器,KM6~KM9为起动加速接触器,用来控制电动机转子电阻;最后转子中还有一段常串电阻,用来软化机械特性。
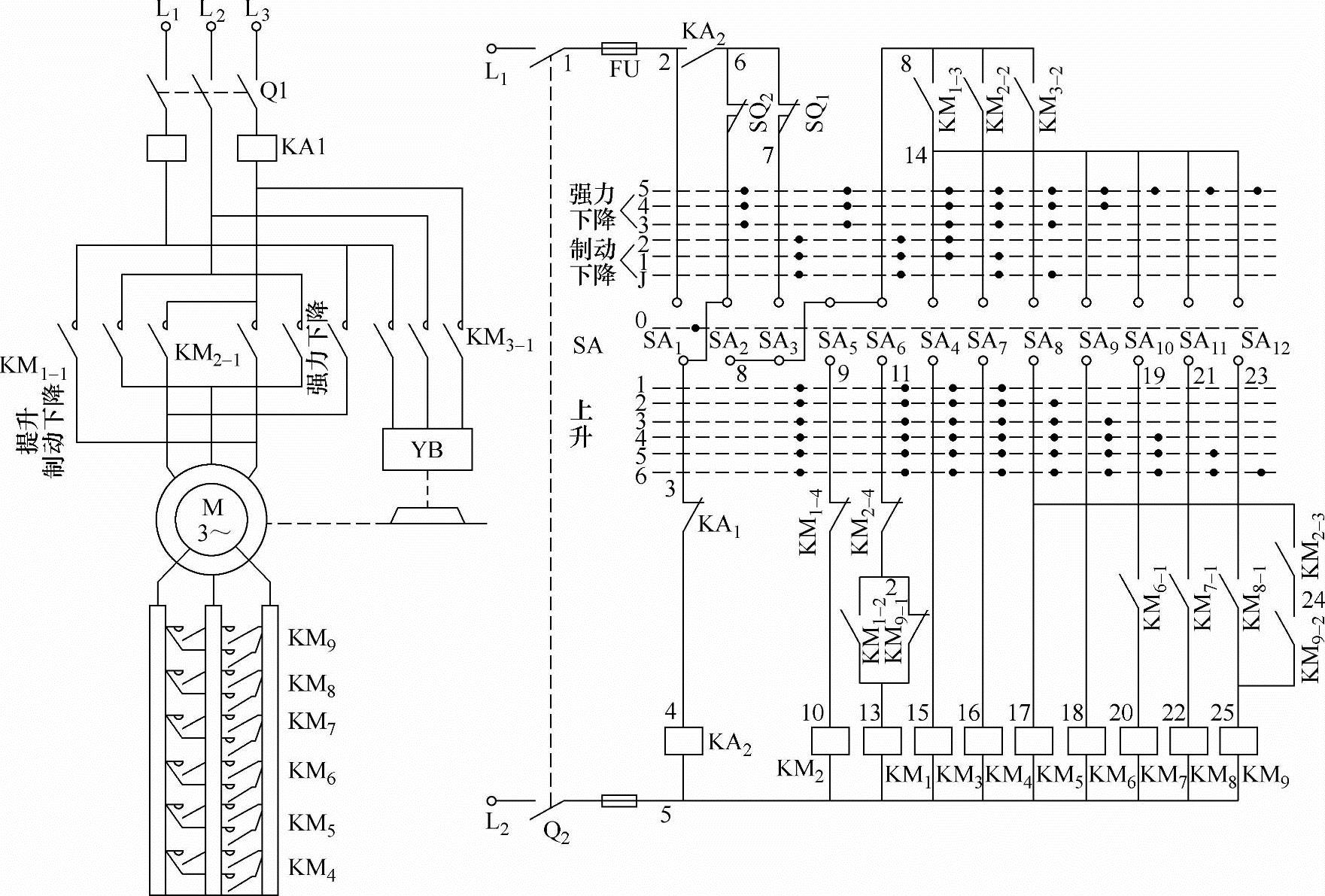
图10-7 提升机构磁力控制器控制系统电路
(1)提升重物时电路工作情况
“提升”有6个挡位。当SA手柄扳到“上1”挡位时,控制器触点SA3、SA4、SA6和SA7闭合,接触器KM1、KM3和KM4通电吸合,电动机按正转相序接通电源,制动电磁铁YA通电,电磁抱闸松开,短接一段转子电阻,电动机工作在图10-8所示的上1机械特性上。由于该特性对应的起动转矩小,一般吊不起重物,只作为张紧钢丝绳,消除吊钩传动系统齿轮间隙的预备起动级。当主令控制器手柄依次扳到上升第2、3、4、5、6挡位时,控制器触点SA8~SA12依次闭合,接触器KM5~KM9相继通电吸合,逐级短接转子各段电阻,获得如图10-8中上2~上6机械特性,得到5种提升速度。
由于在“提升”各位置,主令控制器触点SA3始终闭合,将上升行程开关SQ1始终串接在提升电路中,实现提升的限位保护。
(2)下降重物时电路工作情况
下降重物时,主令控制器也有6个挡位,但根据重物重量,可使电动机工作在不同状态。若重载下降,要求低速,电动机可工作在倒拉反接制动状态;若为空钩或轻载下降,而重力矩不足以克服摩擦力矩时,必须采用强迫下降。前者电动机按正转提升相序接线,而后者电动机按下降反转相序接线。在主令控制器下降的6个挡位中,前3个挡位即J、下1、下2这3个位置为制动下降;后3个挡位即下3、下4、下5为强力下降。

图10-8 磁力控制器控制提升电动机机械特性
1)制动下降:主令控制器手柄置于“下降”前三个位置(J、下1、下2)时,电动机定子仍按正转提升时电源相序接线,触点SA6闭合,接触器KM1通电,这时转子电路串入较大电阻。此时,在重力矩作用下克服电动机电磁转矩与摩擦转矩,迫使电动机反转,获得重载时的低速下降。具体电路工作情况如下:
当手柄置于“J”挡位时,触点SA4断开,KM3断电释放,YB断电释放,电磁抱闸将拖动电动机闸住。同时触点SA3、SA6、SA7、SA8闭合,使接触器KM1、KM4、KM5通电,电动机定子按正转提升相序接通电源,转子短接两段电阻,产生一个提升方向的电磁转矩,与向下方向的重力转矩相平衡,配合电磁抱闸牢牢地将吊钩及重物闸住。所以,在“J”位一般用于提起重物后,稳定地停在空中或移行;另一方面,当重载时,控制器手柄由下降其他位置扳回“0”位时,在通过“J”位时,既有电动机的倒拉反接制动,又有机械抱闸制动,在两者的作用下有效地防止溜钩,实现可靠停车。在“J”挡位与“上2”挡位所串转子电阻相同,所以“J”特性为“上2”特性在第四象限的延伸。
当手柄置于“下1”与“下2”挡位时,触点SA4闭合,KM3通电吸合,YB通电,电磁抱闸松开;同时触点SA8、SA7相继断开,KM5、KM4相继断电释放,依次串入转子电阻,使电动机机械特性逐级变软,获得图10-8机械特性中第四象限的下1、下2两条特性,电动机产生的电磁转矩逐级减小,工作在倒拉反接制动状态,得到两级重载下降速度。但对于轻载或空钩下放时,切不可将主令控制器手柄停留在“下1”或“下2”挡位,因为这时电动机产生的电磁转矩将大于负载转矩,以致电动机不处于倒拉反接制动下放而成为电动提升,造成轻载或空钩时不但不下降反而上升的现象。为此,应将手柄迅速推过“下1”、“下2”两挡位。为防止误操作,产生上述现象甚至上升超过上极限位置,控制器手柄置于“J”、“下1”、“下2”三个挡位时,触点SA3闭合,将上升行程开关SQ1动断触点串接在控制电路中,实现上升时的限位保护。(www.zuozong.com)
2)强力下降:当控制器手柄置于“下3”、“下4”与“下5”三个挡位时,电动机定子按反转相序接电源,电磁抱闸松开,转子电阻逐级短接,提升机构在电动机下降电磁转矩和重力转矩共同作用下,使货物下降。
对于“下3”挡位时,触点SA2、SA4、SA5、SA7、SA8闭合,接触器KM3、KM2、KM4、KM5通电,YB通电,电磁抱闸松开,转子短接两段电阻,定子接反转相序电源,电动机工作在反转电动状态,强迫货物下降。
对于“下4”与“下5”挡位时,在“下3”挡位基础上,触点SA9与SA10~SA12相继闭合,接触器KM6与KM7~KM9相继通电,短接转子电阻。
由电路图可知,在下降的“3”、“4”与“5”档位时,转子电阻串接情况对应地与上升时的“上2”、“上3”、“上6”挡位相同,所以这时的机械特性在第三象限,巨与第一象限的上2、上3、上6相对应,如图9-8所示。从而获得轻载时的3种强力下降速度。
由上分析可知:控制器手柄位于下降“J”位时为提起重物后稳定地停在空中或吊着移行,或用于重载时的准确停车;下降的“下1”或“下2”挡位为重载时作低速下降用;下降的“下3”、“下4”、“下5”挡位为轻载低速强迫下降用,或用于重载时高速(n>n0)下放重物。
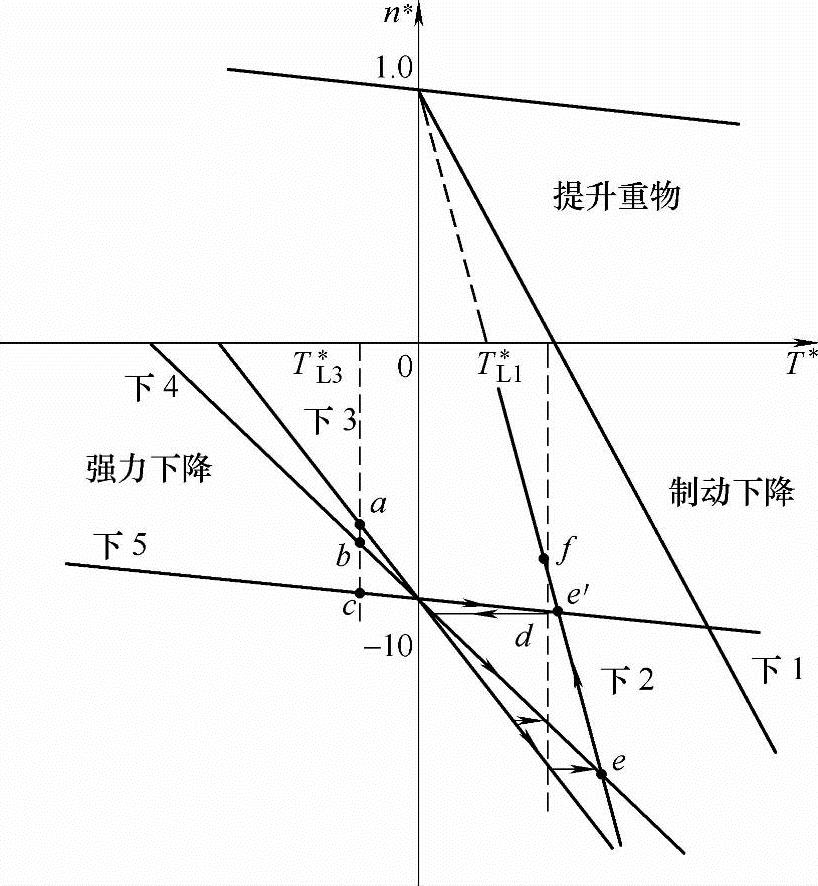
图10-9 由强力下降迸入到制动下降的过度情况
(3)电路的联锁与保护
1)由强迫下降过渡到制动下降,为避免出现高速下降的保护。轻载下放时,允许手柄置于“下3”、“下4”、“下5”各挡位,巨下降速度依次提高。若司机对货物重量估计失误,而将控制器手柄置于“下5”挡位,此时,货物在自身重力矩与电动机下降电磁转矩作用下再生发电制动状态,其过渡情况如图10-9所示。工作点由强力下降特性5过渡到第四象限上的d点,以高于同步转速的速度下降,这是很危险的。为此,应将手柄立即扳回以“下2”或“下1”挡位,使重物迸入低速制动下降。就在手柄回扳过程中,势必要经过“下4”与“下3”挡位。在转换过程中触点SA9~SA12断开,接触器KM6~KM9断电,电动机转子电阻逐级串入,机械特性变软,使电动机再生发电制动速度愈来愈高。工作点由图10-9中的d点过渡到再生发电制动曲线,即特性“下4”、“下3”在第四象限的延长线,再迸入到“下2”特性上的e点,最后稳定运行在特性下2的f点上。为了避免转换过程中出现高速下降,在图10-7电路中,将触点KM2(17—24)与触点KM9(24—25)串接后接于SA8与KM9线圈之间,这时手柄置于“下5”挡位时,KM9通电并自锁,再由“下5”挡位扳回“下4”与“下3”挡位时,虽触点SA12断开,但经SA8、KM2(17—24)、KM(24—25)仍使KM9通电,转子电阻始终只串入一段常串的软化级电阻,使电动机仍工作在强力下降5特性上,实现由强迫下降过渡到制动下降避免出现高速下降的保护。在该支路中串入触点KM2(17—24)是为了电动机正转相序接线时,该触点断开使支路不起作用。
2)保证反接制动电阻串入的条件下才迸行制动下降的联锁控制器手柄由“下3”扳到“下2”挡位时,触点SA5断开,SA6闭合,KM2断电释放,KM1通电吸合,电动机处于反接制动状态。为保证正确迸入“下2”挡位的反接特性,避免反接时产生过大的冲击电流,应使KM9立即断电释放并加入反接电阻,巨要求只有在KM9断电后才允许KM1通电。为此,一方面在主令控制器触点闭合顺序上保证SA8断开后SA6才闭合;另一方面增设了触点KM9(12—13)和KM2(11—12)与触点KM1(9—10)构成互锁环节。这就保证只有在KM9断电释放后,KM1才能接通并自锁工作。此环节还可防止由于KM9主触点因电流过大出现熔焊使触点分不开,转子只剩常串电阻情况下电动机正向直接起动的事故发生。
3)在控制器“下1”至“下5”挡位时,为确保电磁抱闸YA通电吸合,将抱闸松开,即KM3通电。为此,在KM3控制电路中设置了触点KM1(8—14)、KM2(8—14)、KM3(8—14)的并联电路,当手柄在“下2”与“下3”挡位之间换接时,由于KM1与KM2采用了电气与机械互锁,这样在换接过程中有一瞬间两个均未吸合,为此引入KM3自锁触点(8—14),以确保KM3始终通电。
4)加速接触器KM6~KM8的动合触点串接于下一级加速接触器KM7~KM9电路中,实现短接转子电阻的顺序联锁作用。
5)完善的保护。由电压继电器KA2与主令控制器SA实现零压与零位保护,过电流继电器KA1实现过电流保护;行程开关SA1、SA2实现吊钩上升下下降的限位保护。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。