



使用晶闸管构成的周波变换器(cycloconverter)如图7.4所示,这是由两个三相桥式可控整流器SDA-9反并联连接,构成具有四象限运行能力的单相交流电源。承担正方向电流的SDA-9称为P-CONV(正变换器),覆盖四象限中第1和第2象限的动作。另一方面,负方向电流由N-CONV(负变换器)承担,覆盖第3和第4象限。不过,为了方便说明,图中只表示了单相交流输出,实际的装置基本是三相构成的,负载是三相交流电动机。另外,图中还给出了持流电抗器,为了理解后述的输出电压波形,连续换流动作被执行,由于任何错误都可能导致动作失控,所以持流电抗器对稳定运行必不可少。周波变换器基本用于电动机的驱动,因此很多情况下由电动机的绕组代替持流电抗器[4]。
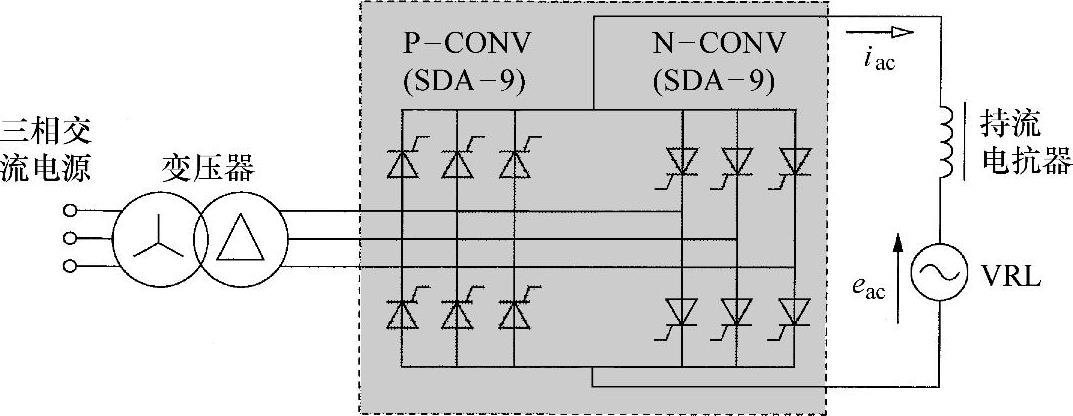
图7.4 周波变换器基本电路的一相构成图
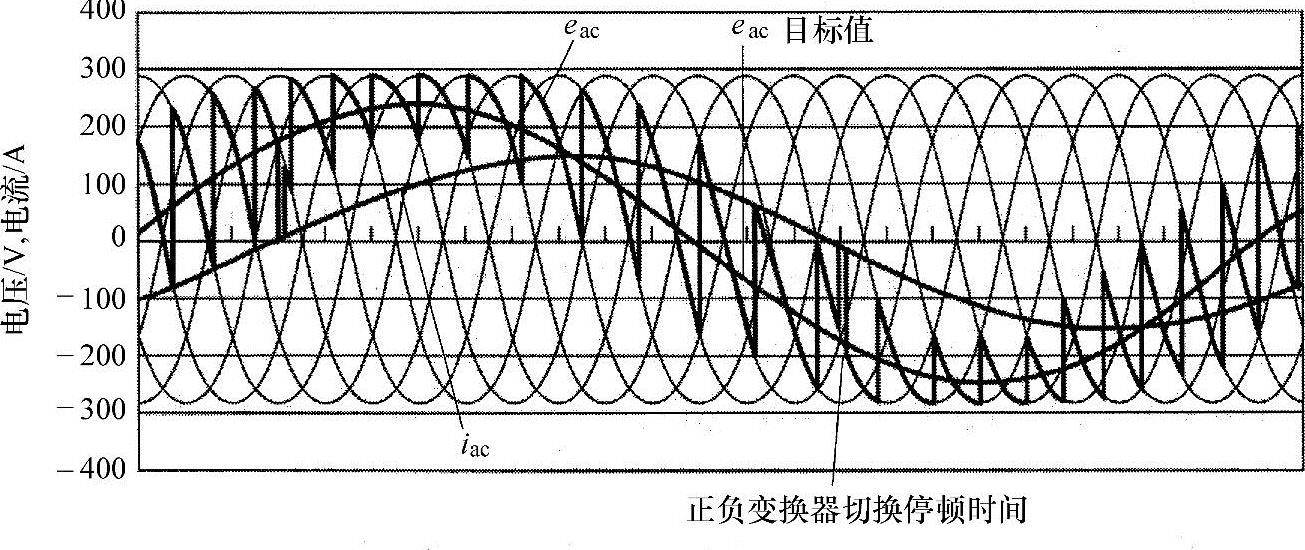
其次,对周波变换器的动作进行说明。在6.2.3节~6.2.5节中说明的可控整流电路的功能是本电路的基础。例如,通过使P-CONV的控制角α变化来输出正弦波形状的电压eac,图7.5所示为该输出电压波形eac,图中也显示了它的目标值。输出电压eac的角速度是ωout,滞后相位角为θ的电流iac流动。由图可知,ωout与电源角速度ωsource相比一定非常小。
由图7.5可知,当eac的目标值横穿零线时,P-CONV平滑地从变换器工作过程进入到逆变器工作过程,但是电流值iac在横穿零线时从P-CONV向N-CONV的转换过程中,连续操作可能会引起电源短路,所以此时一定要先切断P-CONV的门极脉冲,等待正在导通的晶闸管在电流零点自然关断,同时在一定的停顿时间后N-CONV才可以开始工作。大容量晶闸管的关断时间可达几百μs,所以电流停顿时间对变换器的动作有很大影响。
在这里,根据上述的动作说明,若对两个SDA的承担角色进行表示,则如图7.6所示,图中也显示了与所需控制延迟角α的关系。顺便说一下,可控整流器可能的最大输出电压幅值为3Em/π,与输出电压eac的幅值比为A(=0~1),控制延迟角α由式(7.3)进行控制。
α=cos-1[Asin(ωoutt+θ)] (7.3)
 (www.zuozong.com)
(www.zuozong.com)
图7.5 周波变换器的输出电压波形(A=0.9,ωout=0.25ωsource)
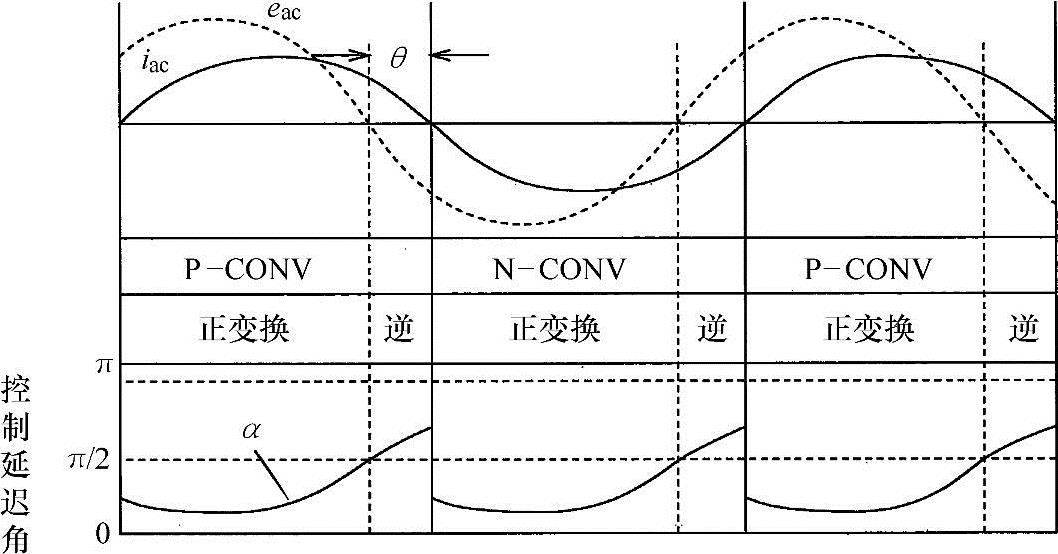
图7.6 正负变换器工作角色区分与控制延迟角的变化
例7.1
将200V/50Hz的三相电源连接到如图7.4所示的周波变换器上,幅值系数A=0.9,输出频率为12.5Hz,对该周波变换器的工作过程进行仿真。其中,电流幅值为150A,滞后相位角为45°。
解 仿真波形如图7.5所示。因为周波变换器的输出电压波形含有很多谐波成分,所以对普通的LR电路进行仿真时,电流中也含有谐波成分,电流通过零点时易引起异常现象,本例中假设正弦电流来进行仿真。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。